图论专题
Floyd算法
Floyd 算法(Floyd-Warshall algorithm)是解决加权图中顶点间的最短路径算法之一,使用范围:无负权回路即可,边权可以为负值,运行一次算法即可求得任意两点间最短路。
其状态转移方程如下(结点 $i$ 借助 $k$ 更新到 $j$ 的距离):
$$G[i][j]=min(G[i][j],\ G[i][k]+G[k][j]);$$
$G[i][j]$ 表示顶点 $i$ 到 $j$ 的最短距离,$k$ 是枚举的借助的点,时间复杂度:$O(n^3)$。
初始状态:
- 如果 $i$,$j$ 之间有边,$G[i][j] = len$;
- 如果 $i == j$,$G[i][j] = 0$;
- 其余情况,$G[i][j] = ∞$。
注意:
需要判断 $i → k$ 以及 $k → j$ 是否真的有边,如果没有的话要进行特判(因为如果 $len_{i→k}=∞,\ len_{k→j}=-1,\ len_{i→j}=∞$,此时不应该更新 $G[i][j]$)。
模版:
|
|
例题:课程表 IV
Dijkstra算法
Dijkstra 算法是典型最短路径算法,用于计算一个节点到其他节点的最短路径,即图的单源最短路径问题。它的主要特点是以起点为中心向外层层扩展(广度优先遍历思想),直到扩展到终点为止。
Dijkstra 算法时间复杂度为 $O(n^2)$,使用优先队列优化的 Dijkstra 算法时间复杂度可降低至 $O((m+n)\thinspace log\thinspace n)$,其中 $n=|V|$,$m=|E|$。
需要注意的是 Dijkstra 算法适用于有环图,但不能有效处理带负权边的图,如果边权是负数情况,则应该使用 Bellman-Ford 算法和 SPFA 算法。
算法思想:
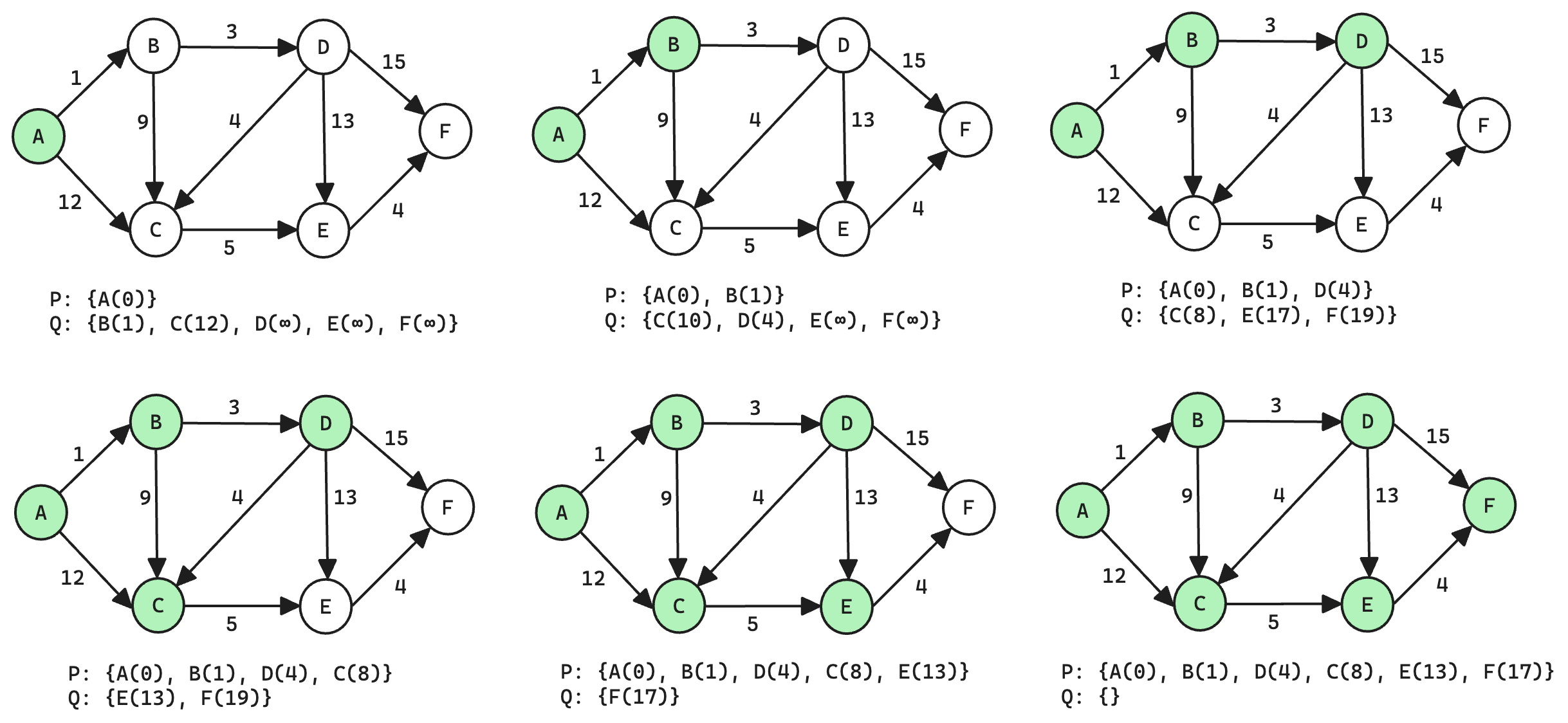 Dijkstra 算法流程
Dijkstra 算法流程
- 在一个图中,把所有顶点分为两个集合 $P$,$Q$($P$ 为最短路径集合,$Q$ 为待选集合),用 $dis$ 数组保存源点到各个顶点的最短路径(到自身为0);
- 初始化 $P$ 集合,就是加入源点到该集合,并在 $vis$ 数组标记(代码中的 vis[st] = 1),那么 $Q$ 集合就是剩下的顶点构成了;
- 在 $Q$ 集合中找到这样一个顶点:源点到该顶点(记为 $curr$)的路径最短,把该点加入 $P$ 集合,列出以 $curr$ 为起点的所有边(终点记为 $t$),判断从源点到每一个 $t$ 顶点(因为以 $curr$ 为起点的边有多个)经过 $curr$ 顶点的路径是否会变小,更新 $dis[t]$ 的值;
- 重复步骤3,直到 $Q$ 集合为空,算法结束,此时 $dis$ 数组就存储了从源点到各个顶点的最短路径。
Dijkstra算法模版
代码 时间复杂度:O(n^2)
|
|
优先队列优化的Dijkstra算法
使用优先队列(小根堆)维护,能在 $O(1)$ 时间内找到未访问的最小距离(curr_w)和对应的结点(curr)。
代码 时间复杂度:O((n+m) log n)
|
|
例题
代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35class Solution { public: typedef pair<int, int> PII; vector<PII> G[102]; bool vis[102]; int dis[102]; priority_queue<PII, vector<PII>, greater<PII>> q; void dijkstra(int st) { // init dis[] memset(dis, 0x3f, sizeof(dis)); dis[st] = 0; q.emplace(0, st); // 注意这里的顺序是(距离, 结点编号) while(!q.empty()) { auto [curr_w, curr] = q.top(); q.pop(); if (vis[curr]) continue; vis[curr] = true; for (auto [t, t_w] : G[curr]) { if (dis[curr] + t_w < dis[t]) { dis[t] = dis[curr] + t_w; q.emplace(dis[t], t); } } } } int networkDelayTime(vector<vector<int>>& times, int n, int k) { for (auto v : times) G[v[0]].emplace_back(make_pair(v[1], v[2])); dijkstra(k); int res = 0; return ((res = *max_element(dis+1, dis+n+1)) == 0x3f3f3f3f)? -1: res; } };
例2:LeetCode 1334. 阈值距离内邻居最少的城市
[解析]:建双向图,跑 n 遍 Dijkstra 算法。
代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51class Solution { public: typedef pair<int, int> PII; vector<PII> G[102]; int dis[102][102]; // dis[i][] 表示源点为 i 的 dis 数组 bool vis[102]; void dijkstra(int st) { priority_queue<PII, vector<PII>, greater<PII>> q; memset(vis, 0, sizeof(vis)); memset(dis[st], 0x3f, 102 * sizeof(int)); dis[st][st] = 0; q.emplace(0, st); while (!q.empty()) { auto [curr_w, curr] = q.top(); q.pop(); if (vis[curr]) continue; vis[curr] = true; for (auto [t, t_w] : G[curr]) { if (dis[st][t] > dis[st][curr] + t_w) { dis[st][t] = dis[st][curr] + t_w; q.emplace(dis[st][t], t); } } } } // 从 city_i 出发,路径距离小于等于 distanceThreshold 的城市数量 int cityCount(int i, int n, int distanceThreshold) { int res = 0; for (int j = 0; j < n; j++) { if (dis[i][j] <= distanceThreshold) ++res; } return res - 1; } int findTheCity(int n, vector<vector<int>>& edges, int distanceThreshold) { for (auto v : edges) { G[v[0]].emplace_back(make_pair(v[1], v[2])); G[v[1]].emplace_back(make_pair(v[0], v[2])); } int res = 0, cnt = INT_MAX; for (int i = 0; i < n; i++) { dijkstra(i); if (cityCount(i, n, distanceThreshold) <= cnt) { cnt = cityCount(i, n, distanceThreshold); res = i; } } return res; } };
例3:Leetcode 1786. 从第一个节点出发到最后一个节点的受限路径数
[解析]:优化的 Dijkstra 算法 + 动态规划。
代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51class Solution { public: vector<pair<int, int>> G[20002]; priority_queue<pair<int, int>, vector<pair<int, int>>, greater<pair<int, int>>> q; bool vis[20005]; int dis[20005]; void dijkstra(int st) { memset(dis, 0x7f, sizeof(dis)); dis[st] = 0; q.emplace(make_pair(0, st)); while(!q.empty()) { auto [curr_w, curr] = q.top(); q.pop(); if (vis[curr]) continue; vis[curr] = true; for (auto [t, t_w] : G[curr]) { if (dis[t] > dis[curr] + t_w) { dis[t] = dis[curr] + t_w; q.emplace(make_pair(dis[t], t)); } } } } int countRestrictedPaths(int n, vector<vector<int>>& edges) { for (auto e : edges) { G[e[0]].emplace_back(make_pair(e[1], e[2])); G[e[1]].emplace_back(make_pair(e[0], e[2])); } dijkstra(n); vector<long long> dp(n + 1, 0); dp[n] = 1LL; // 构建索引数组,按照dis从小到大排列 vector<int> idx(n+1); for (int i = 1; i <= n; i++) idx[i] = i; sort(idx.begin(), idx.end(), [&](const int i, const int j) { return dis[i] < dis[j]; }); for (int i : idx) { for (auto [to, w] : G[i]) { if (dis[i] > dis[to]) { dp[i] += dp[to]; dp[i] %= 1000000007; } } if (i == 1) break; // 剪枝,比1的距离还大的点,最短路径一定不会经过他们,不用考虑 } return dp[1]; return 0; } };
拓扑排序
拓扑排序(Topological sort)是在 DAG(Directed Acyclic Graph, 有向无环图)上找到一个可以执行的线性顺序。图上存在拓扑序列与图是 DAG 之间形成充分必要条件。
 拓扑排序
拓扑排序
一种比较常用的拓扑排序方法:
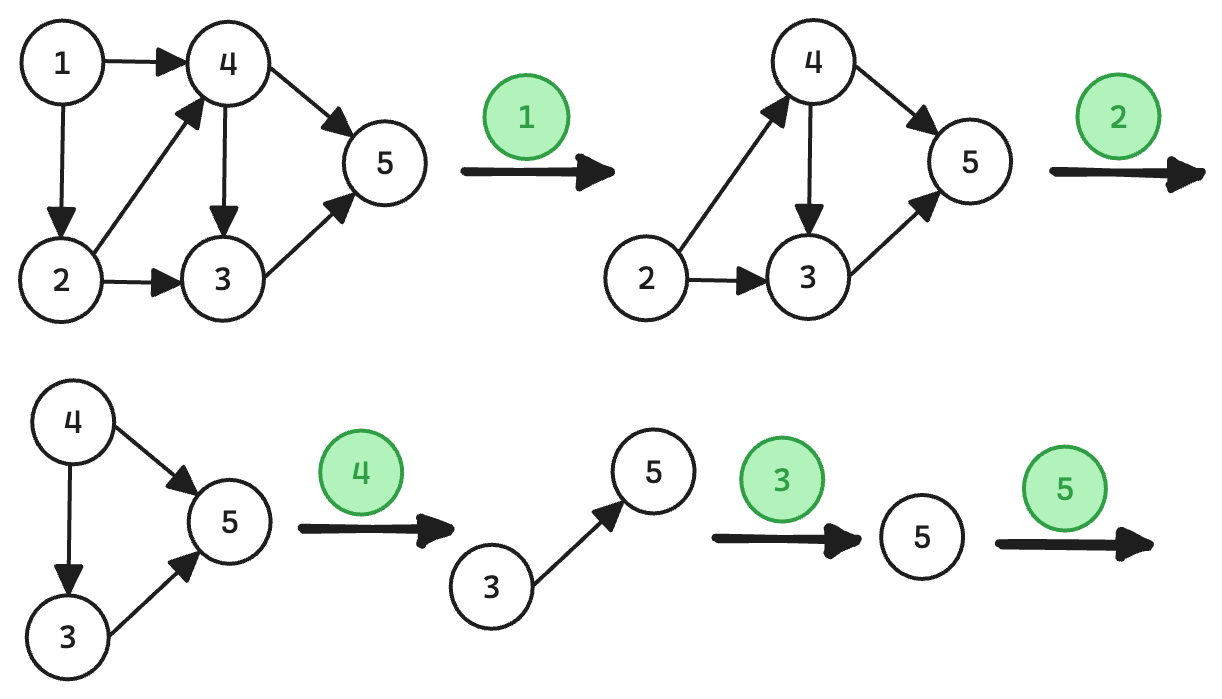
- 从 DAG 中选择一个没有前驱(即入度为0)的顶点并输出;
- 从图中删除该顶点和所有以它为起点的有向边;
- 重复 1 和 2 直到当前的 DAG 图为空或当前图中不存在无前驱的顶点为止。后一种情况说明有向图中必然存在环。
对应的算法步骤为:
- 每次从入度为 0 的结点开始,加入队列。入度为 0 ,表示没有前置结点;
- 处理入度为 0 的结点,把这个结点指向的结点的入度 -1;
- 重复 1 和 2,如果队列都处理完毕,但是和总结点数不符,说明有些结点形成环。
|
|
例题
代码
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28class Solution { public: vector<int> findOrder(int numCourses, vector<vector<int>>& prerequisites) { vector<int> inDegree(numCourses, 0); vector<vector<int>> G(numCourses, vector<int>()); for (auto v : prerequisites) { inDegree[v[0]]++; G[v[1]].emplace_back(v[0]); } queue<int> q; for (int i = 0; i < numCourses; i++) { if (inDegree[i] == 0) q.push(i); } vector<int> res; while(!q.empty()) { int node = q.front(); q.pop(); res.emplace_back(node); for (auto i : G[node]) { if (--inDegree[i] == 0) q.push(i); } } return (res.size() == numCourses)? res: vector<int>(); } };